
A deep dive into plastic flow modeling
Back to updatesOne of the main issues we are tackling at The Ocean Cleanup is to determine where, and in what concentrations, plastic pollution is distributed throughout the oceans. In order to clean up the worlds’ ocean garbage patches effectively, we need to get a crystal clear picture of where we should start.
To achieve this, we are building a computer model. By simulating the influx and velocity of ocean plastics and interaction with the barrier, we are using an efficient method to test and optimize different designs, setups, locations and geographical orientations of The Ocean Cleanup array.
Building this computer model is roughly comparable to carving a sculpture. First, you begin with the rough outlines. Then you start to chisel away in a subtler way, step by step refining the arms, legs, the body, and the head. Finally, you come to a point where you start to work very precisely on the details like eyes, ears and a mouth. Following through in those details on every aspect of your sculpture will result in a perfect masterpiece.
To create this ‘masterpiece’, we are building three complementary computer models. First, there is the macroscale model, charting ocean plastic pollution on a global level and comparable to making the rough outlines of a sculpture. Then comes the mesoscale model, zooming in on the workings of currents and waves of a highly polluted area, like defining a torso, arms, legs and a head. Finally, there is the microscale model, zooming in very closely on floating plastic particles interacting with the barrier or in other words: shaping essential details like eyes, ears and a mouth.
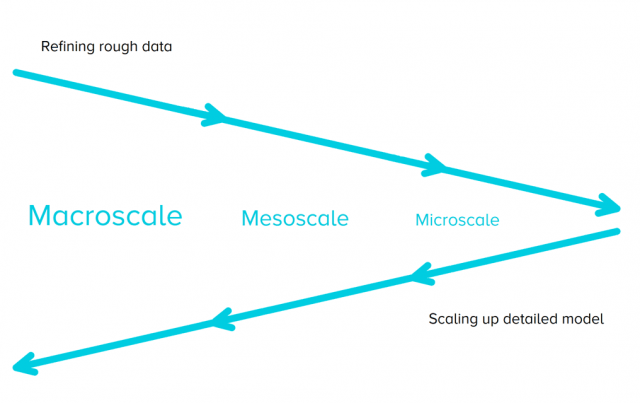
The macro-, meso- and microscale models are summing up as our ‘multiscale’ model. If we want to create a clear picture of marine plastic pollution, it is necessary to bridge those models in such a way that we can use detailed information to build the big picture. That is why our computational modelers are using a strategy that looks like this:
Thanks to our Mega Expedition we conducted last summer, we have sampled the Great Pacific Garbage Patch with more than 30 transects.

Now, we are inserting the measurement data from the samples into our state-of-the-art multiscale computer model. To build it, we are using all science at hand. One of our major sources is open access data from meteorological and oceanic models describing historical behavior of the sea-surface current, waves, and wind, dating back until 1993. Combined with the reports on the entry points and quantity of plastic pollution, this already gives a pretty good picture of where, how and when plastic pollution has entered and traveled the oceans during the past 20 years. Thanks to our multiscale computer model we can look much closer and with more precision to answer two of The Ocean Cleanup’s vital questions: what is the optimal location for The Ocean Cleanup array and how to optimize the design of the system?
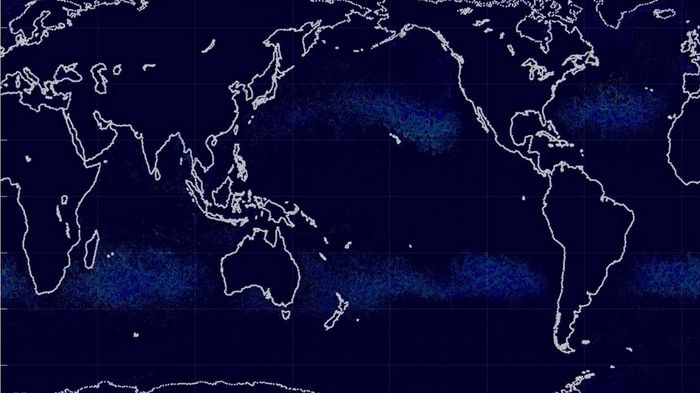
Macroscale figure showing plastic influx and concentration over time
This GIF, showing the macroscale aspect of our computational model, provides structured guidance on the locations of the most highly polluted parts of our oceans. It clearly shows how plastic enters the oceans and subsequently gets trapped in the rotating currents. It also shows that the North Pacific gyre contains one of the highest concentrations of plastic pollution. The resolution of the models used in this part of the world is 1/12 of a degree at best, which corresponds in average to about 10 km.
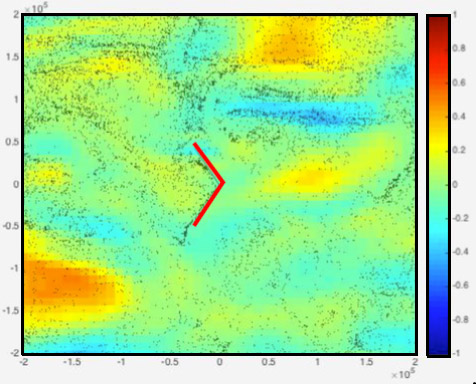
Because we want to create a far more intricate picture of how these rotating currents actually behave, we are building a mesoscale model of the North Pacific gyre. The marine interaction of wind, waves, and currents is one of nature’s most complex and strongest phenomena. Seen from a far-off perspective, the large rotating movements of ocean gyres seem pretty straightforward. But when zooming in, it becomes clear that constantly changing smaller vortices appear within these large rotating currents. Naturally, these smaller vortices influence the behavior of the floating plastic transported by these currents and have an effect on the capturing efficiency of the barrier.
Once a hotspot is found in the macroscale model, we zoom in on the area of interest to see how the plastic interacts with the barrier when forced by the local environmental conditions to understand whether the system is able to serve its objective of concentrating the floating plastic to an extraction point. By taking up a model of the barrier in the mesoscale model, it is possible to simulate the interaction between the currents, plastic hotspots and the barrier on a scale ranging from 100 km down to a 100 meters. Aside from finding the optimal location, we also use this model to simulate different barrier shapes, collection methods, and different geographic orientations.
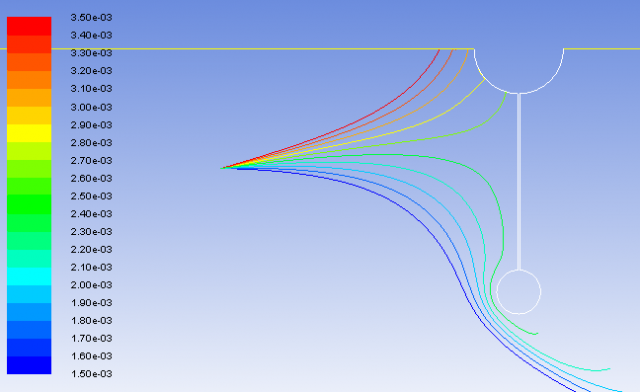
This brings us down to the microscale computer 3D model. The macroscale and mesoscale models are site-specific, but the microscale model is barrier specific. In simpler terms, where the macro- and mesoscale models answer questions on location and shape of The Ocean Cleanup array, the microscale model is designed to find out how the barrier interacts with the vertical distribution of plastic. On the basis of this knowledge, we can find out how the material can be most efficiently captured. When you put a barrier in the water, the hydrodynamic interaction with plastic particles is quite complex. And there is also to be dealt with the flexible floating structure of the barrier itself, interacting with waves and currents. To gain more insight in the actual workings of such a flexible, floating structure we have conducted several scale model tests in 2015, at research institutes Deltares and MARIN.
Scale model tests of The Ocean Cleanup barrier at MARIN
The outcomes of these tests have provided valuable input on the actual behavior of- and loads on the barrier when put into a controlled simulation of various sea states. We have also conducted tests on the interaction between plastic and the barrier, gaining insights on the possibilities of the capturing of plastic particles, but also looking into plastic overtopping or diving under the barrier. One of the main objectives of the microscale model is to chart the hydrodynamic interaction between water, plastic and the barrier. We also have to take into account environmental conditions and plastic characteristics. In the end, this will help us design a barrier that serves maximum efficiency once put out in the Great Pacific Garbage Patch.
More details on this work will be presented by Bruno Sainte-Rose at the Offshore Marine and Arctic Engineering conference which will be held in Busan, South Korea, between June 19th-24th 2016.