
The Final Design of the World’s First Cleanup System
Back to updatesOn May 11th, 2017 we unveiled our new method to clean up the world’s ocean garbage patches. Instead of having one massive cleanup system fixed to the seabed, we unveiled a plan where we would instead deploy a fleet of many smaller, free-floating systems. To be able to passively collect the plastic, we came up with the idea to suspend a sea anchor from the floating barrier.
This ‘drogue’ would be suspended in waters several hundred meters in depth, where the water flows slower than at the surface. It would slow down the system, creating a difference in speed between the system and the plastic, allowing for the plastic to accumulate along the cleanup barrier at the surface.
Relative to the original fixed mooring plan, this concept enabled a swifter cleanup at a lower cost. The modularity of the design also made it easier to gradually scale up. Hence, we announced that the first cleanup system was set to be deployed into the Great Pacific Garbage Patch in 2018 – two years ahead of schedule.
Assembly commenced earlier this year, which has put us on schedule to deploy the world’s first cleanup system this summer.
However, this is not the design that we are currently building in California. Let me explain…
WIND AND WAVES MATTER
Four days after we unveiled the sea anchor concept in a rather, well, grand way, I was called into an engineering meeting for some news.
Boyan unveils the anchors of the pilot! pic.twitter.com/lJ8E2tHfBs
— The Ocean Cleanup (@TheOceanCleanup) May 11, 2017
The team had been investigating an anomaly involving the operational speed of the system with the sea anchor, and it was conclusive: we had an issue on our hands.
In the modeling of the behavior of the cleanup system traveling through the oceans, our focus had been on the oceanic forces exerted on the system. Since we had seen large waves ‘running through’ the system (the system just moves up and down, but doesn’t absorb energy), and smaller waves generally don’t apply significant forces to the kind of floating structures that the team has experience with (oil rigs, vessels, wind turbines), we disregarded them in our modeling. However, because the play of forces on our cleanup system is so subtle, it turned out that the force of the smaller waves on the cleanup system actually have a significant effect, requiring us to adapt our thinking.
Have a look at this photo of one of our North Sea Prototypes:

If you look closely, you’ll notice that the picture was taken on a moderately windy day, with small wind waves all around. However, the sea is visibly calmer behind the prototype than in front of it. The reason for this is that the cleanup system absorbs the energy of the waves, and when this happens, the energy must go somewhere, so it gets converted into movement.
The combination of wind force and wave drift force is so significant that these two forces combined are often greater than the force of the current. And, because these two forces affect the cleanup system more than the plastic, this meant that occasionally the cleanup system would go faster than the plastic, causing the plastic to come into contact with the outside of the barrier instead of the inside (figure 2a). In other instances, when the wind and waves come from an opposing direction of the surface current, the system would move about as fast as the anchor – meaning the anchor wouldn’t have any effect on the cleanup system (figure 2b).
Thankfully, The Ocean Cleanup team members are expert problem solvers. In the early days of the project, we were told it would be impossible to clean the oceans because the currents prevent the plastic from staying in one spot. We decided to turn this ‘problem’ into a solution by using the movement of the oceans to our advantage. Here again, we asked: can we turn the problem introduced by the wind and wave drift forces into a solution?
I’m happy to report that we found a way.
FASTER INSTEAD OF SLOWER
To capture plastic, we need a difference in speed between the plastic and our cleanup system. With the sea anchor proving to be counterproductive on this front, we wondered: what if we eliminated the anchors, and get the difference in speed from the wind and waves instead?
The idea is simple. The plastic and the cleanup systems are affected by the current in equal amounts, so these forces cancel each other out. On the other hand, the cleanup systems are profoundly influenced by the combined wind and wave drift force, while the plastic is virtually unaffected by it. This force causes the systems to go through the water faster than the plastic, allowing us to collect the plastic. This is how the wind and wave drift force went from being a significant problem to becoming the driving force behind our technology.
Of course, all of this has only explained how we get steady propulsion for our cleanup systems, but it does not clarify how we keep the ‘mouth’ of the cleanup system continuously facing in the right direction. Once again, we make use of the wind and wave drift forces.
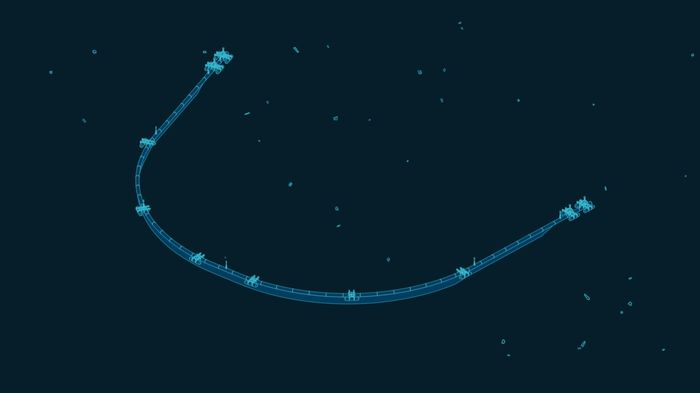
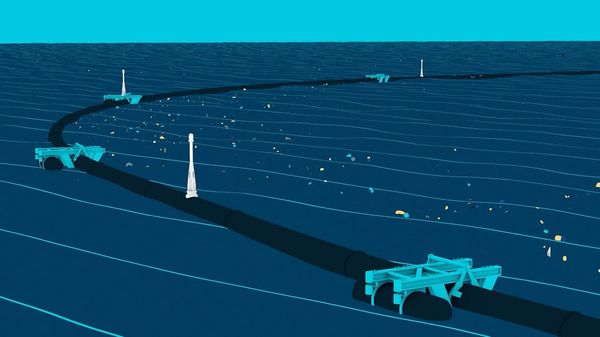
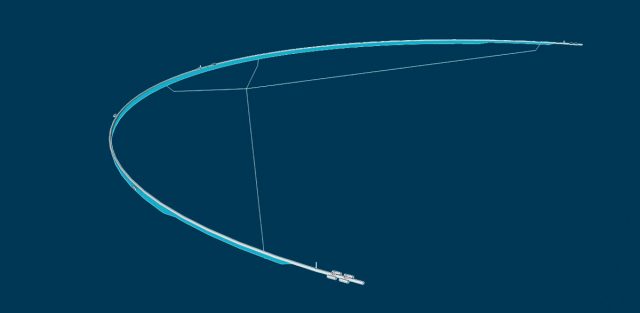
Suspended below the floater pipe is an impenetrable screen which prevents plastic from escaping underneath the system. The screen is three meters deep in the center section of the cleanup system, but its depth tapers off to two meters towards the ends. The last 35 meters on both ends have no screen section at all. When the system is propelled through the water by the wind and wave drift forces, the screen creates a drag through the water. Because the screen is tapered, the center of the cleanup system experiences more resistance than the ends, causing the center of the cleanup system to ‘lag behind.’ Hence the cleanup system naturally bends into a U-shape. A closing line (as seen in Fig 4) will also be attached within the system to prevent the system from flipping ‘inside-out’ in case the wind turns 180 degrees.
AND THE WIND OF CHANGE
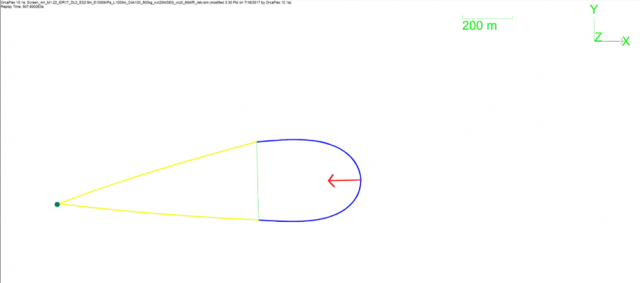
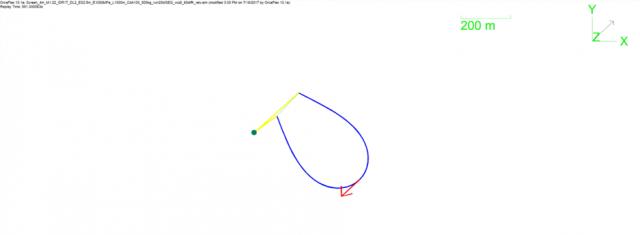
When the direction of the wind and waves change, this creates an imbalance with the system; and the part of the system with the highest drag is no longer in the far back of the system. Nature doesn’t like being out of balance, so it will automatically correct this. The sides of the system (which, remember, have the least amount of water drag) will then overtake the center of the system that has the highest amount of drag. The result: the system automatically stabilizes itself, and will always directly face the direction it is traveling in.
Apart from the stability, this iteration of the concept has a few more advantages. First, the average difference in speed between the cleanup systems and the plastic is projected to be slightly higher than it would have been with the anchor, meaning more plastic can be collected using this method.
Secondly, inherent to this design is that the wind waves collide with the convex side of the cleanup system. This is good because it means those waves will be unable to cause plastic to spill from the system. Finally, we managed to simplify the design even more, which reduces the chances of a system breaking down, makes them easier to install and further reduces the cost of the cleanup.
After completing the redesign last summer and passing third-party reviews, this is the design that is currently being constructed and is set to head into the Great Pacific Garbage Patch two months from now.

Although there is a fair chance this won’t be the last iteration of our ocean cleanup technology, we have high confidence that it addresses the stability issues and that this will be the design responsible for collecting the first plastic from the Great Pacific Garbage Patch later this year.